什么是CVXPY?
CVXPY是一个Python嵌入建模语言,用于凸优化问题。它会自动将问题转换为标准形式,调用求解器并解包结果。
下面的代码使用CVXPY解决了一个简单的优化问题:
import cvxpy as cp
# 创建两个标量优化变量。
x = cp.Variable()
y = cp.Variable()
# 创建两个约束条件。
constraints = [x + y == 1,
x - y >= 1]
# 构建目标函数。
obj = cp.Minimize((x - y)**2)
# 构建并求解问题。
prob = cp.Problem(obj, constraints)
prob.solve() # 返回最优值。
print("status:", prob.status)
print("optimal value", prob.value)
print("optimal var", x.value, y.value)
状态:最优
最优值:0.999999999761
最优解:1.00000000001 -1.19961841702e-11
“optimal”是通过solve方法分配给状态的值,告诉我们问题已成功解决。最优值(在这里基本上是1)是在满足约束条件的所有变量选择中,目标的最小值。最后一行打印出了实现最佳目标的x和y的值(基本上是1和0)。
prob.solve() 返回最优值并更新 prob.status , prob.value 和问题中所有变量的 value 字段。
更改问题
Problems 是不可变的,这意味着它们在创建后不能更改。要更改目标或约束,请创建一个新问题。
# 替换目标。
prob2 = cp.Problem(cp.Maximize(x + y), prob.constraints)
print("optimal value", prob2.solve())
# 替换约束条件(x + y == 1)。
constraints = [x + y <= 3] + prob2.constraints[1:]
prob3 = cp.Problem(prob2.objective, constraints)
print("optimal value", prob3.solve())
optimal value 1.0
optimal value 3.00000000006
不可行和无界问题
如果问题不可行或无界,状态字段将被设置为“不可行”或“无界”。问题变量的值字段不会被更新。
import cvxpy as cp
x = cp.Variable()
# 一个不可行的问题。
prob = cp.Problem(cp.Minimize(x), [x >= 1, x <= 0])
prob.solve()
print("status:", prob.status)
print("optimal value", prob.value)
# 一个无界问题。
prob = cp.Problem(cp.Minimize(x))
prob.solve()
print("status:", prob.status)
print("optimal value", prob.value)
status: infeasible
optimal value inf
status: unbounded
optimal value -inf
请注意,对于最小化问题,如果问题无法实现,则最优值为 inf ;如果问题无界,则最优值为 -inf 。对于最大化问题来说,情况正好相反。
其他问题状态
如果CVXPY调用的求解器解决了问题,但精度较低,问题状态将指示达到的较低精度。表示较低精度的状态有:
“optimal_inaccurate”
“unbounded_inaccurate”
“infeasible_inaccurate”
对于找到的解类型(即最优解、无界解或无可行解),问题变量会按照通常的方式进行更新。
如果求解器完全无法解决问题,CVXPY会抛出 SolverError 异常。如果发生这种情况,您应该尝试使用其他求解器。有关详细信息,请参阅 选择求解器 讨论。
CVXPY为不同状态字符串提供以下常量别名:
OPTIMALINFEASIBLEUNBOUNDEDOPTIMAL_INACCURATEINFEASIBLE_INACCURATEUNBOUNDED_INACCURATEINFEASIBLE_OR_UNBOUNDED
要测试问题是否成功解决,您应该使用以下代码:
prob.status == OPTIMAL
INFEASIBLE_OR_UNBOUNDED 状态很少见。它用于当求解器能够确定问题是不可行的还是无界的,但不能确定具体是哪个情况。您可以通过将目标函数设置为一个常数(例如, objective = cp.Minimize(0) )来确定确切的状态。如果使用状态码 INFEASIBLE_OR_UNBOUNDED 解决了新问题,则原始问题是不可行的。如果新问题使用状态 OPTIMAL 解决,则原始问题是无界的。
向量和矩阵
Variables 可以是标量、向量或矩阵,即它们可以是 0、1 或 2 维的。
# 标量变量。
a = cp.Variable()
# 形状为 (5,) 的向量变量。
x = cp.Variable(5)
# 形状为 (5, 1) 的矩阵变量。
x = cp.Variable((5, 1))
# 形状为 (4, 7) 的矩阵变量。
A = cp.Variable((4, 7))
您可以使用您选择的数值库构造矩阵和向量常量。例如,如果 x 是 CVXPY 表达式 A @ x + b 中的变量,那么 A 和 b 可以是 Numpy 数组、SciPy 稀疏矩阵等。甚至 A 和 b 可以是不同类型的。
目前可以使用以下类型作为常数:
NumPy的ndarrays(NumPy的多维数组)
NumPy的matrices(NumPy的矩阵)
SciPy的sparse matrices(SciPy的稀疏矩阵)
下面是一个使用向量和矩阵的CVXPY问题的示例:
# 求解有界最小二乘问题。
import cvxpy as cp
import numpy
# 问题数据。
m = 10
n = 5
numpy.random.seed(1)
A = numpy.random.randn(m, n)
b = numpy.random.randn(m)
# 构建问题。
x = cp.Variable(n)
objective = cp.Minimize(cp.sum_squares(A @ x - b))
constraints = [0 <= x, x <= 1]
prob = cp.Problem(objective, constraints)
print("Optimal value", prob.solve())
print("Optimal var")
print(x.value) # 一个NumPy的ndarray。
最优值为 4.14133859146
最优变量
[ -5.11480673e-21 6.30625742e-21 1.34643668e-01 1.24976681e-01
-4.79039542e-21]
约束条件
如示例代码所示,您可以使用 == , <= 和 >= 来构建CVXPY中的约束条件。等式约束和不等式约束在标量、向量或矩阵中都是逐元素处理的。例如,约束条件 0 <= x 和 x <= 1 意味着 x 的每个元素都介于0和1之间。
如果要表示半定锥约束的矩阵不等式,请参见 semidefinite 。该部分详细说明了如何表达半定锥不等式。
您不能使用 < 和 > 构建不等式。在现实世界中,严格不等式是没有意义的。此外,您不能将约束链在一起,例如 0 <= x <= 1 或 x == y == 2 。Python解释器会以CVXPY无法捕获的方式处理链式约束。如果您编写了链式约束,CVXPY将引发异常。
参数
Parameters 是常量的符号表示。参数的目的是在不重构整个问题的情况下更改问题中常量的值。在许多情况下,多次求解参数化程序比重复求解新问题要快得多:阅读本节后,请务必阅读关于 纪律化参数化编程 (DPP)的教程。
参数可以是向量或矩阵,就像变量一样。创建参数时,您有选项可以指定参数条目的属性,例如参数条目的符号,参数是否对称等。这些属性在 标准凸规划 中使用,并且在未指定时是未知的。参数可以在创建后的任何时候被赋予一个常量值。常量值必须具有与创建参数时指定的维度和属性相同。
# 正数标量参数。
m = cp.Parameter(nonneg=True)
# 具有未知符号的列向量参数(默认情况下)。
c = cp.Parameter(5)
# 具有负数条目的矩阵参数。
G = cp.Parameter((4, 7), nonpos=True)
# 将常量值赋给G。
G.value = -numpy.ones((4, 7))
可以使用一个值来初始化参数。下面的代码段是等价的:
# 创建参数,然后赋值。
rho = cp.Parameter(nonneg=True)
rho.value = 2
# 使用一个值来初始化参数。
rho = cp.Parameter(nonneg=True, value=2)
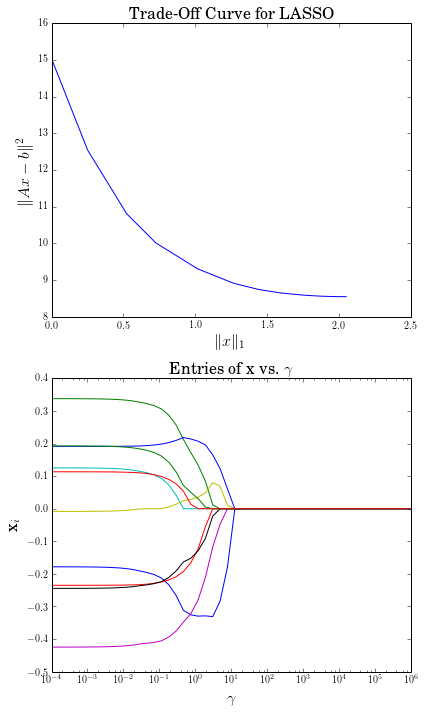
计算权衡曲线是参数的常见用法。下面的示例计算一个LASSO问题的权衡曲线。
import cvxpy as cp
import numpy
import matplotlib.pyplot as plt
# 问题数据。
n = 15
m = 10
numpy.random.seed(1)
A = numpy.random.randn(n, m)
b = numpy.random.randn(n)
# 由于DCP规则,gamma必须是非负的。
gamma = cp.Parameter(nonneg=True)
# 构造问题。
x = cp.Variable(m)
error = cp.sum_squares(A @ x - b)
obj = cp.Minimize(error + gamma*cp.norm(x, 1))
prob = cp.Problem(obj)
# 构造 ||Ax-b||^2 vs. ||x||_1 的权衡曲线
sq_penalty = []
l1_penalty = []
x_values = []
gamma_vals = numpy.logspace(-4, 6)
for val in gamma_vals:
gamma.value = val
prob.solve()
# 使用expr.value获取问题中表达式的数值。
sq_penalty.append(error.value)
l1_penalty.append(cp.norm(x, 1).value)
x_values.append(x.value)
plt.rc('text', usetex=True)
plt.rc('font', family='serif')
plt.figure(figsize=(6,10))
# 绘制权衡曲线。
plt.subplot(211)
plt.plot(l1_penalty, sq_penalty)
plt.xlabel(r'\|x\|_1', fontsize=16)
plt.ylabel(r'\|Ax-b\|^2', fontsize=16)
plt.title('Trade-Off Curve for LASSO', fontsize=16)
# 绘制x的条目 vs. gamma。
plt.subplot(212)
for i in range(m):
plt.plot(gamma_vals, [xi[i] for xi in x_values])
plt.xlabel(r'\gamma', fontsize=16)
plt.ylabel(r'x_{i}', fontsize=16)
plt.xscale('log')
plt.title(r'\text{Entries of x vs. }\gamma', fontsize=16)
plt.tight_layout()
plt.show()
可以轻松地并行计算权衡曲线。下面的代码在并行计算上述LASSO问题中每个 \(\gamma\) 的最优x。
from multiprocessing import Pool
# 为 gamma 赋值并找到最优的 x。
def get_x(gamma_value):
gamma.value = gamma_value
result = prob.solve()
return x.value
# 并行计算(此处设置为 1 个进程)。
pool = Pool(processes = 1)
x_values = pool.map(get_x, gamma_vals)